




大皖新闻讯 5月19日,记者从合肥工业大学获悉,近日,合工大90后"黄山学者"李霄剑研究员带领团队研制成功的基于3D腹腔镜的术中精准测量系统——"工大阅体"正式通过www.seethrough.com.cn开源发布,进入产业转化。
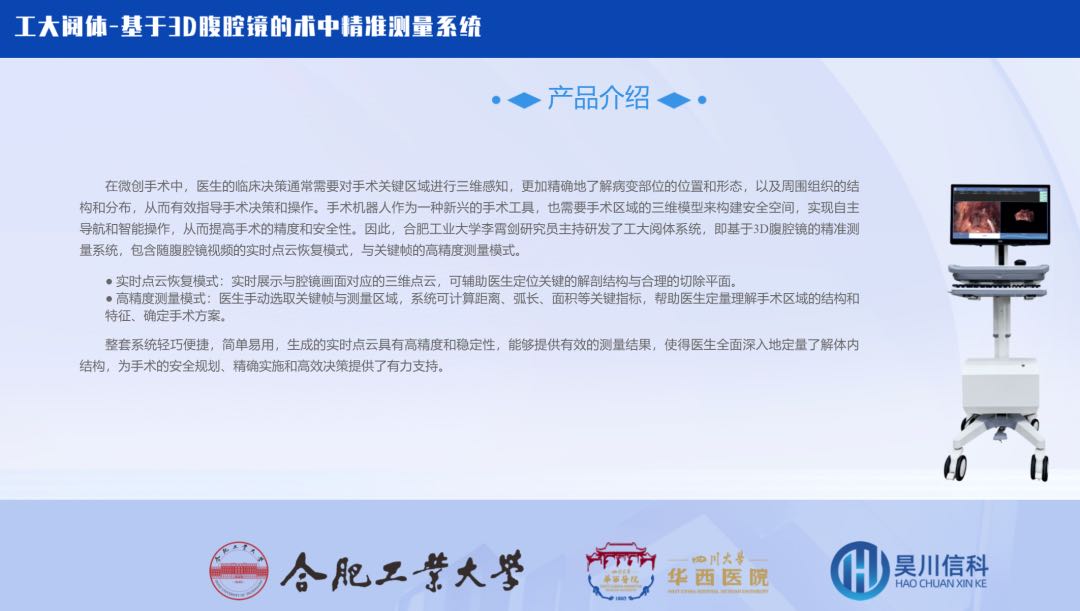
据了解,这套系统包含随腹腔镜视频的实时点云恢复模式和关键帧的高精度测量模式,能够有效帮助手术机器人更加精准识别体内病变的位置、形态以及周围组织的结构和分布,辅助医生制定微创手术方案,减少手术中的操作风险,从而大大减轻病患的痛苦。该系统对于推动微创手术的智能化发展具有重要意义。
主持研发基于3D腹腔镜的术中精准测量系统
随着医疗科技的快速发展,借助3D技术成功完成腹腔镜一类的微创手术,不仅能够大大提高诊疗的精确度,而且可以有效缩短术后恢复时间。然而,人体是精妙而复杂的,如何提高手术机器人系统的体内适应性和智能化水平,为手术机器人的安全操作建构一个清晰准确的手术区域三维模型,实现更加精确、稳定、易操作的目标?
为此,李霄剑带领团队开始了长期的探索和研究。在研究过程中,他提出了利用双目腔镜影像的对极几何约束,在不引入额外信息的情况下,让双目腔镜的左右目图像形成自我监督机制,从而将当前单帧双目影像既作为训练集又作为测试集。训练只针对该帧影像的深度估计网络模型,并反复训练至训练误差最小的过拟合状态,以此求取当前帧的深度估计结果,在消除算法泛化性影响的同时提升了算法精度。在这个思路基础上,利用轻量化深度估计网络、元学习初始化、稀疏光流辅助监督等技术,构建了可在体内环境中精准测量三维空间信息的自监督深度估计算法。
以该算法为核心,李霄剑主持研发了"工大阅体"系统。该系统可适配任意双目腔镜,具有实时深度估计和高精度尺寸测量两种工作模式。在实时深度估计模式下,系统可提供Abs_Rel小于4%并以18帧每秒进行刷新的高精度体内环境三维动态点云;而在高精度尺寸测量模式下,系统可以冻结腔镜视频并为医生提供直线、曲线和面积的精准测量工具,医生可以利用这些工具在冻结的画面下进行组织尺寸的精准测量,测量误差Abs_Rel小于3.5%。
自2022年9月,该系统在四川大学华西医院投入临床使用以来,先后参与了肝胆胰外科和普外科,于肝胆手术、胆囊手术和胃肠手术等二十余场手术。经过检验,华西医院认为该系统能够有效支撑手术规划、术中导航、术中决策与临床科研,且具有轻巧便捷、简单易用等优点。
回家乡工作的90后博导期待更多年轻人加入
记者了解到,自动化智能化医疗机器人系统的研究与开发是李霄剑从博士阶段就坚持的研究方向。2018年,以"黄山学者"身份加入合工大管理学院后,李霄剑立即获得了学校在科研条件、团队建设、津贴奖励等各方面政策的全力支持,这使得他可以心无旁骛地沿着自己的研究志趣继续深入探索。
围绕体内环境三维感知与重构、微创手术机器人自主控制、机器人人机协同操控等研究方向,李霄剑带领团队很快聚焦活体体内环境下医疗机器人环境感知与智能控制方面的关键科学问题,在医疗机器人体内复杂环境感知、微米机器人系统设计与精准导航控制、微创手术机器人的人机协同控制等方面取得了一系列创新性研究成果。先后主持包括国家自然科学基金重点项目、青年项目、安徽省自然科学基金杰青项目、安徽省科技重大专项项目等,在Science Robotics,Automatica,IEEE Transactions on Robotics等期刊发表多篇论文,获得2019年度高等学校科学研究优秀成果奖(科学技术)科技进步一等奖和2021年度安徽省科学技术奖科技进步一等奖。


记者了解到,作为一名"90"后博导,李霄剑的团队吸引了许多青年学生加入,他指导的学生团队先后获得"互联网+"创新创业大赛国赛银奖2项、省赛金奖3项、省赛银奖3项,"挑战杯"创业大赛省赛银奖1项。
作为土生土长的合肥人,李霄剑2011年毕业于东南大学自动化专业,于2017年获得中科大控制科学与工程博士学位和香港城大机械与生物医学工程博士学位。此后,他在香港城市大学机械与生物医学工程学院从事了一年的博士后研究。
"能够成为一名光荣的合工大人,在这样的环境中安心科研、教书育人,我十分感谢学校。欢迎更多有梦想、有追求的年轻人加入我们,在未来的征程上一起携手同行,共做时代追梦人。"李霄剑说。
大皖新闻记者 汪艳(图源自合肥工业大学)
编辑 陶娜

